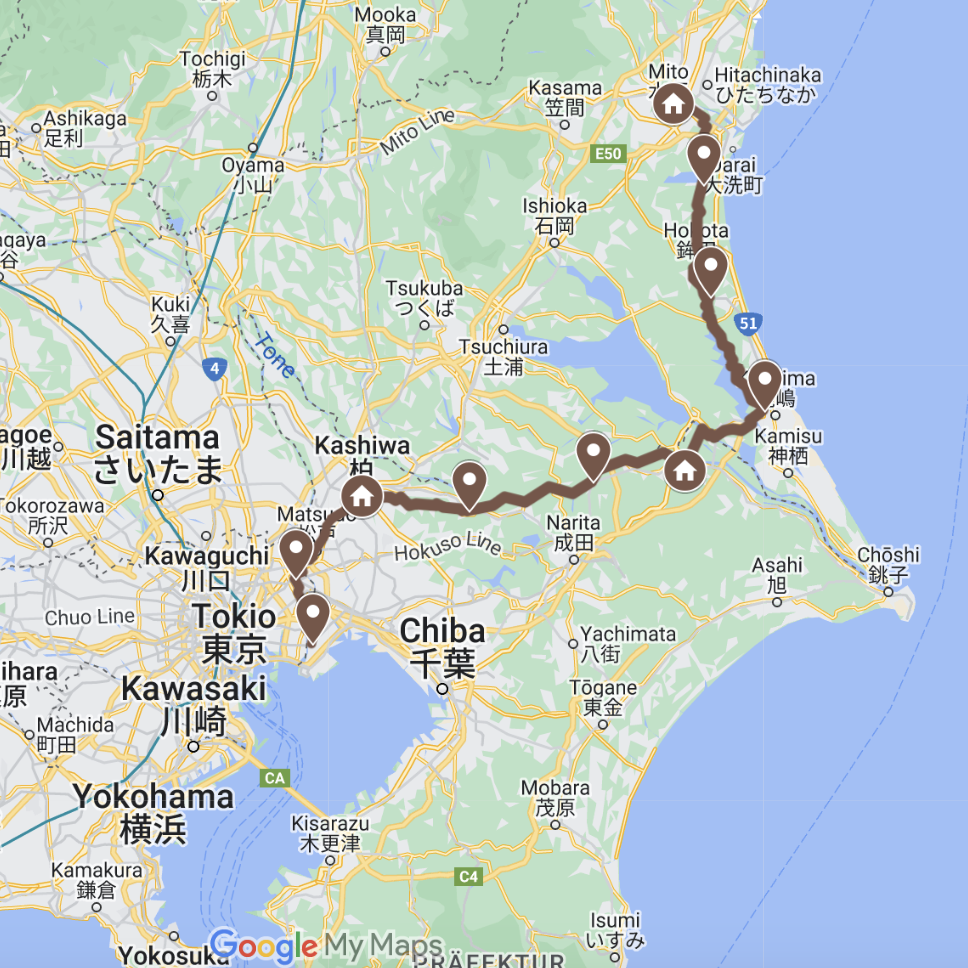
Gestern und heute bin ich 50 Kilometer einen sehr schönen Weg gelaufen: einem kleinen Fluss entlang, für Fussgänger und Radfahrer hergerichtet, am westlichen Rand des Grossraumes Tokio. Alles urban, links und rechts überall Häuser. Und Schilder, viele Schilder. Wer Schilder gerne hat – und ich zähle mich auch dazu – ist hier selig.
Ich habe mir erlaubt, eine Stelle akkurat zu dokumentieren: die direkte Umgebung eines kleinen Sitzplatzes an ebendiesem Weg:
1: Der Sitzplatz
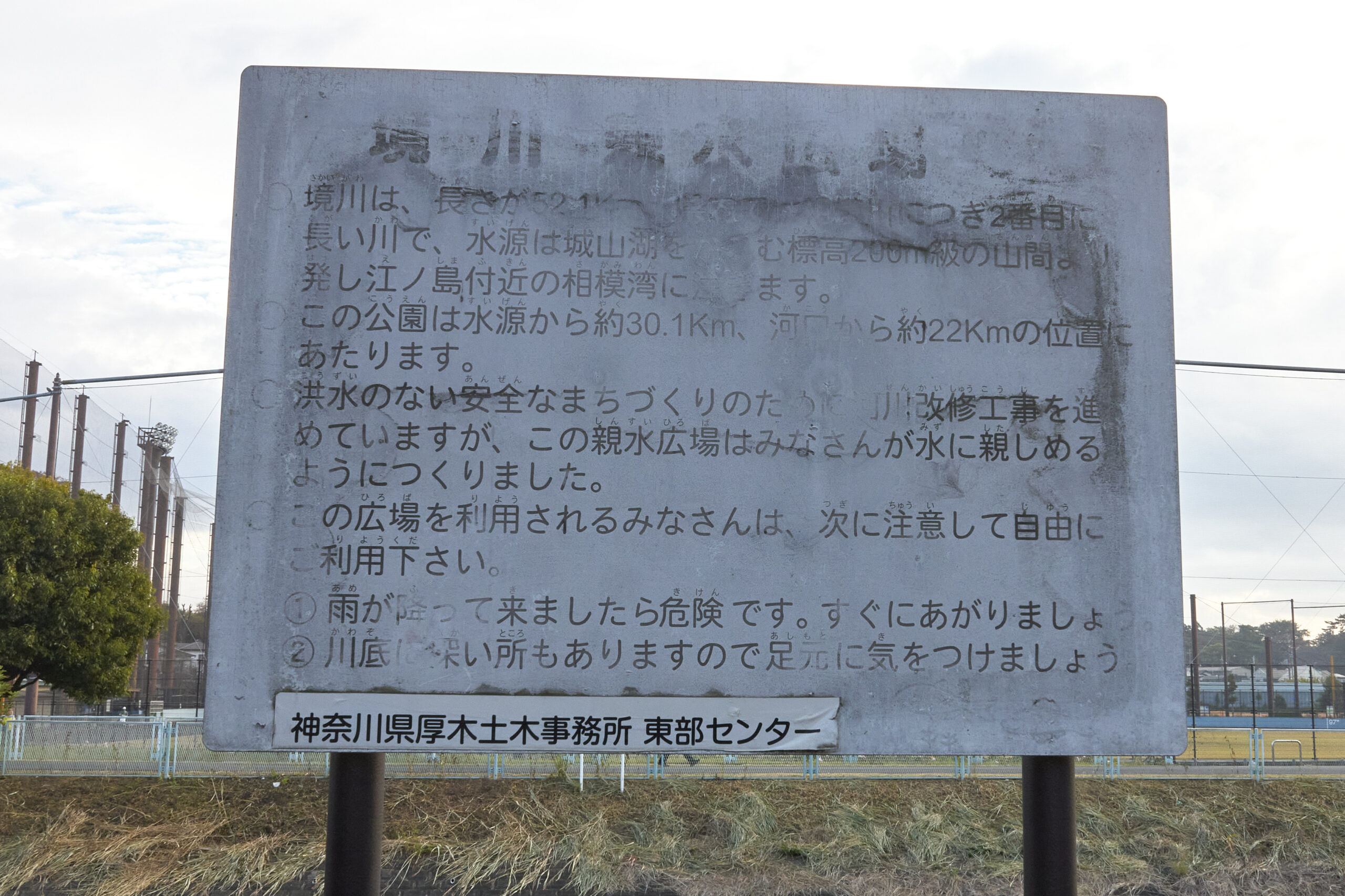
2: Hochoffizielle Beschreibung des Wasserweges, mit wichtigen Hinweisen zur Instandhaltung und Sicherheit.
3: Vorsicht! Starker Regen kann schnell zu einem gefährlichen Hochwasser führen.
4: Wirf keinen Müll in den Fluss, der Fluss weint sonst.
5: Keinen Müll in den Fluss werfen, bitte.
6: Siehe 5, mit dem Zusatz, illegale Müllentsorgung zu überwachen.
7: Müll wegwerfen verboten.
8: Mein Lieblingsschild: Eine Liste welche Tiere an ganz sauberen (oben) bis ganz schmutzigen (unten) Orten leben, mit der Anmerkung, dass jeder einen sauberen Fluss möchte.
9: Ein herzige Aufforderung an Eltern ihre Kinder zu beaufsichtigen, mit einer ähnlichen Warnung wie 3.
10: Gefahr! Fussgänger haben Vorrang.
11: Hundebesitzer sollen die Hundehäufchen entfernen und darauf achten, dass andere nicht verletzt werden.
Die Schilder funktionieren, ganz offensichtlich, ich habe auf den ganzen 50km keinen Unfall oder Häufchen und kaum Müll gesehen.
PS: Man entschuldige bitte meine Übersetzungsversuche, sie kommen der Tiefe der Originale nicht mal nahe.